ממשק מנוע DC למיקרו-בקר הוא מושג חשוב מאוד ביישומים תעשייתיים ורובוטיים רבים. באמצעות ממשק מנוע DC למיקרו-בקר אנו יכולים לשלוט בכיוון המנוע, לשלוט על מהירות המנוע. מאמר זה מתאר אותך, בקרת מהירות של מנוע DC באמצעות 8051 מיקרו בקר בעזרת בקר אנדרואיד Bluetooth. תרשים הבלוקים מוצג להלן.

דיאגרמת חסימה של בקרת מהירות של מנוע DC על ידי יישום אנדרואיד
בקרת מהירות של מנוע DC באמצעות אפליקציית Android
בקרת מהירות של מנוע DC באמצעות אנדרואיד נייד יש יישומים רבים כמו יישומים תעשייתיים, מדרגות נעות, מעליות, יישומים רובוטיים, ויישומי מערכות אבטחה. המשתמש צריך להתקין יישום אנדרואיד בסמארטפון האנדרואיד שלו.
המשתמש יכול לשלוח הוראות לבקרת מהירות מנוע DC. תקשורת אלחוטית באמצעות Bluetooth משמשת לשליחת פקודות למשתמש ולבקר. רכיבי החומרה העיקריים במעגל הם מיקרו-בקר 8051, מנהל התקן מנוע L293D IC, מנוע DC, מודול Bluetooth וסמארטפון אנדרואיד.
אנא עיין בקישור זה למידע נוסף אודות 8051 מיקרו-בקר היסטוריה ויסודות
זרם היציאה המקסימלי של פין המיקרו-בקר הוא 15mA ב -5 וולט, אך הוא אינו גורם לתפקוד המנוע DC ואפילו EMF האחורי (כוח המניע האלקטרוני) המיוצר על ידי המנוע עלול לפגוע במיקרו-בקר.
לכן, לא ראוי לממשק מנוע DC ישירות למיקרו-בקר. כך שהמעגל של נהג המנוע (L293D IC) רגיל ממשק מנוע DC והמיקרו-בקר .
נהג מנוע (L293D)
L293D הוא מעגל משולב של נהג מנוע בעל גשר H כפול (IC). נהגי מנוע משמשים כמגברי זרם מכיוון שהם לוקחים אות בקרה זרם נמוך ומספקים אות זרם גבוה יותר. אות זרם גבוה זה משמש להנעת המנועים. L293D מכיל שני מעגלי נהג מובנים בגשר H . במצב הפעולה הנפוץ שלו, ניתן להניע שני מנועי DC בו זמנית, הן בכיוון קדימה והן לאחור. ניתן לשלוט על פעולות המנוע של שני מנועים על ידי לוגיקת קלט בסיכות 2 & 7 ו 10 & 15.
לוגיקת הקלט 00 או 11 תפסיק את המנוע המתאים. לוגיקה 01 ו- 10 יסובבו אותו בכיוון השעון וכיוון השעון, בהתאמה. פינים אפשריים 1 ו- 9 (המתאימים לשני המנועים) חייבים להיות גבוהים כדי שהמנועים יתחילו לפעול. כאשר קלט הפעלה גבוה, מנהל ההתקן המשויך מופעל.
כתוצאה מכך, התפוקות הופכות לפעילות ועובדות בשלב עם התשומות שלהן. באופן דומה, כאשר קלט ההפעלה נמוך, מנהל ההתקן ההוא מושבת, והפלטים שלו כבויים ובמצב עכבה גבוהה. תרשים הסיכה והמבנה הפנימי של L293D IC מוצגים להלן.

תרשים סיכות ומבנה פנימי של L293D IC
מה זה אנדרואיד?
ה מערכת הפעלה אנדרואיד עובד על בסיס לינוקס, והוא מיועד בעיקר למכשירים ניידים עם מסך מגע כגון טלפונים חכמים ומחשבי לוח. אחת ממערכות ההפעלה הניידות הנפוצות ביותר בימינו היא אנדרואיד. האנדרואיד היא תוכנה שהוקמה בפאלו אלטו מקליפורניה בשנת 2003.

אנדרואיד נייד
האנדרואיד היא מערכת הפעלה חזקה והיא תומכת במספר רב של יישומים בסמארטפונים. יישומים אלה נוחים ומתקדמים יותר עבור המשתמשים. החומרה התומכת בתוכנת אנדרואיד מבוססת על פלטפורמת ארכיטקטורת ARM .
אנדרואיד היא מערכת הפעלה עם קוד פתוח פירושה שהיא בחינם וכל אחד יכול להשתמש בה. לאנדרואיד יש מיליוני אפליקציות זמינות שיכולות לעזור לך לנהל את חייך בדרך זו או אחרת והיא זמינה בעלות נמוכה בשוק מסיבות אלה אנדרואיד פופולרי מאוד.
תרשים סכמטי הסבר לבקרת מהירות של מנוע DC
תרשים סכמטי של מעגל בקרת מהירות המנוע DC והסבר על הפעולה ניתן להלן.

תרשים סכמטי
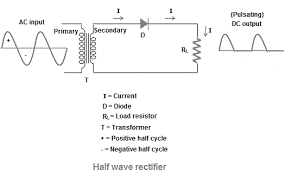
המעגל משתמש באספקת חשמל סטנדרטית הכוללת שנאי מדרגות מ -230 וולט ל -12 וולט ו -4 דיודות היוצרות מיישר גשר המספק זרם זרם פועם המסונן על ידי קבל אלקטרוליטי של כ 470 µF עד 1000 µF.
מכיוון שהספק המסנן אינו מווסת, נעשה שימוש ב- IC LM7805 בכדי לקבל קבוע של 5 וולט DC בסיכה מספר 3. 5 וולט DC המווסת מסונן עוד יותר על ידי קבל אלקטרוליטי קטן של 10 µF לכל רעש שנוצר על ידי המעגל.
אות הבקרה ממכשיר אנדרואיד יישלח באמצעות Bluetooth. אות זה יועבר עם המיקרו-בקר בעזרת משדר ומקלט של שני המכשירים. אות זה יסומן באות אחת השולטת במהירות ובכיוון המנוע.
כיצד לשלוט על מהירות המנוע dc? בפרויקט זה, עיקרון העבודה העיקרי הוא כי פולסי PWM נוצרים מהמיקרו-בקר המתוכנת כדי לאפשר סיכה 1 של L293D להגדלה ולהקטנת מחזור הפעולה של הפולסים. פעימות חובה אלו יכולות להוביל להנעת מנוע DC בכיוון הנכון במהירות ספציפית.
אפנון רוחב הדופק
אפנון רוחב הדופק מושגת מפלט של בקר מיקרו שתוכנת כראוי לקחת נתונים שהתקבלו כך על ידי התקן Bluetooth שהתממשק אליו. מודול Bluetooth אחד מתממשק כראוי למיקרו-בקר לצורך זרימת נתונים דו-כיוונית בזמן שהתוכנית מבוצעת לפיתוח פעימות PWM.
אפליקציית האנדרואיד מכל טלפון חכם מתקשרת באמצעות ה- Bluetooth המובנה של הטלפון למודול ה- Bluetooth המחובר למיקרו-בקר לצורך פעולות כנדרש. מחזור החובה של אפנון הדופק מוצג להלן.

מחזור חובה של PWM
כפתור מגע למעלה בטלפון החכם שמריץ את תוכנית Android משמש להגדלת מחזור החובה בזמן של ה- PWM ואילו כפתור המגע למטה מיועד להפחתת מחזור החובה.

יישום אנדרואיד לבקרת מהירות מנוע DC
ה מנוע DC עובר דרך נהג מנוע L293D עם מחזור חובה שונה המופעל כדי לאפשר סיכה 1 של L293D מוזנת מבקר המיקרו לבקרת מהירות. סיכות הנתונים של LCD המחוברות למיקרו-בקר כדי להציג את אחוז המהירות בה המנוע פועל.
מכאן ששליטה מהירה במנוע DC באמצעות יישום אנדרואיד היא דרך חסכונית, מעשית והבטוחה ביותר לחסוך בחשמל. ניתן להשתמש בטכניקת PWM פשוטה (Pulse Width Modulation) כדי לשלוט על מהירות המנוע. מחזור החובה של הגל שולט במהירותו. על ידי החלפת יציאות פלט, זה ישנה למעשה את כיוון המנוע.
יתר על כן, כל שאילתות בנוגע למאמר זה אנא הוסף את הצעותיך החשובות על ידי תגובה בסעיף ההערות למטה. הנה שאלה עבורך, מהם היישומים של ממשק DC Motor למיקרו-בקר?