EtherCAT פותחה תחילה על ידי גורם ראשי PLCs היצרן הוא Beckhoff Automation המשמש במערכות בקרה בזמן אמת & אוטומציה תעשייתית . Beckhoff Automation פיתחו גרסת Fieldbus משלהם כמו LightBus בשנות ה-80 כדי לטפל בבעיית רוחב הפס עבור ממשקים אחרים. עבודה נוספת על פרוטוקול זה הביאה לבסוף להמצאת EtherCAT. בקהוף השיק את פרוטוקול EtherCAT בשנת 2003 ברחבי העולם. לאחר מכן, הם תרמו את הזכויות ל-EtherCAT Technology Group (ETG) בשנת 2004. ל-ETG יש מפתח פעיל במיוחד וגם קבוצת משתמשים. מאמר זה דן בסקירה כללית של יסודות Ethercat - עבודה עם אפליקציות.
מה זה Ethercat?
EtherCAT או Ethernet Control Automation Technology היא מערכת רשת תעשייתית התלויה במערכת ה-Ethernet המשמשת להשגת תקשורת מהירה ומיומנת יותר. אז, EtherCAT היא רשת מהירה מאוד המשמשת לעיבוד נתונים עם חומרה ותוכנה ייעודיים. רשת זו משתמשת בתצורת מאסטר-עבד, דופלקס מלא עם כל טופולוגיית רשת .
הזמן שלוקח לעיבוד 1000 נקודות קלט/פלט הוא 30 שניות ומתקשר עם 100 צירי סרוו בתוך 100 מאיתנו. צירי סרוו יקבלו ערכים מוגדרים כדי לשלוט בנתונים ולדווח על מצב בפועל. צירים אלה מסונכרנים באמצעות שיטת שעון מבוזר שהיא גרסת IEEE 1588 פשוטה ומפחיתה את הריצוד מתחת ל-1 us. ה-EtherCAT מספק פלט מהיר מכיוון שהודעות מעובדות בתוך החומרה לפני שהן מועברות לעבד הבא.
ארכיטקטורת EtherCAT
ארכיטקטורת רשת EtherCAT מוצגת להלן המשתמשת בעקרון המאסטר/עבד לשליטה בגישה למדיום. בארכיטקטורה זו, ה-EtherCAT המאסטר הוא בדרך כלל מערכת הבקרה המשתמשת ביציאת Ethernet טיפוסית וכן את המידע המאוחסן בתצורת הרשת בתוך קובץ ה-ENI (EtherCAT Network Information).

קובץ מידע הרשת של EtherCAT נוצר פשוט על סמך קבצי ESI (EtherCAT SlaveInformation) שניתנו על ידי הסוחרים עבור כל מכשיר. כאן, הצומת הראשי משדר את הפריימים לצמתי העבד שיכולים להכניס ולהסיר נתונים ממסגרות אלו. התקני עבדים הם צמתים כמו כונני מנוע EPOS3 המכילים את יציאות ה-Ethernet לתקשורת דרך מאסטר EtherCAT. כאן, המאסטר EtherCAT הוא התקן מחשב המשמש לשמירה על תקשורת הנתונים בין המאסטר כמו גם עבדים שונים.
איך EtherCAT עובד?
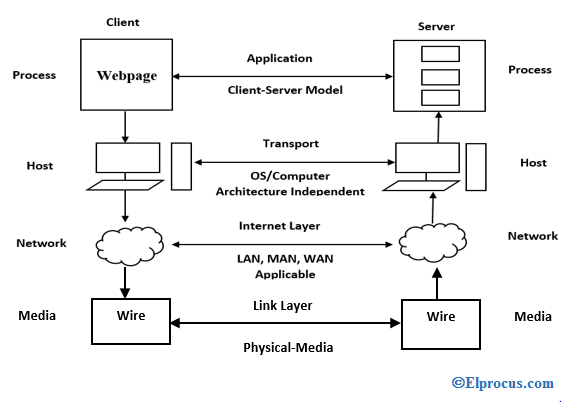
EtherCAT משמש כדי להתגבר על התקלות האופייניות של Ethernet תעשייתי באמצעות מצב הפעולה בעל הביצועים הגבוהים שלו, שבו בדרך כלל מספיקה מסגרת בודדת כדי לשדר ולקבל נתוני בקרה מכל הצמתים ואליהם. פרוטוקול EtherCAT בנוי על השכבה הפיזית של Ethernet עם זאת, EtherCAT משתמש בגישת עיבוד תוך כדי תנועה עבור העברה וניתוב הודעות אשר נקראת גם תקשורת תוך כדי תנועה במקום שימוש ב-TCP/IP.
תצורות המאסטר והעבד של EtherCAT מוצגות להלן. בתצורה זו, המאסטר של Ethercat משדר חבילת נתונים (טלגרם) לאורך כל עבד הנקראת גם צומת.
התכונה העיקרית של EtherCAT היא שהעבדים בתצורה שלעיל יכולים לקרוא אחרת לחלץ בפשטות את הנתונים הקשורים הנדרשים מהמברק ולהוסיף מידע לטלגרם לפני שהוא עובר לצומת או לעבד השני. אז, המברק נע לאורך כל העבדים המחוברים ואחרי זה חוזר אל המאסטר.

פרוטוקול EtherCAT שולח מברק מהמכשיר הראשי לכל העבדים המחוברים ברשת. כל עבד בתוך הרשת יכול פשוט לקרוא נתונים החלים על אותו עבד ויכול להוסיף נתונים לטלגרם לפני שהוא עובר לצומת השני.
קריאה וכתיבה של הנתונים פשוט מופעלים באמצעות ASIC מיוחד בכל עבד של EtherCAT. בגישה זו, כל עבד יכניס עיכוב מינימלי להליך והתנגשויות אינן ברות ביצוע.
פרוטוקול EtherCAT פשוט מספק תקשורת בזמן אמת ודטרמיניסטית התואמת לבקרת תנועה מסונכרנת ורב צירית ללא דרישה לחומרה נוספת כדי להשיג סנכרון בין מספר צירים.
סובלנות תקלות
בתצורת המאסטר והעבד של EtherCAT, אם הפלט של הצומת האחרון אינו קשור למאסטר, הנתונים מוחזרים אוטומטית בכיוון אחר באמצעות פרוטוקול EtherCAT. אז, חותמת הזמן נשמרת.
כל צומת בתצורה שלמעלה חותמת את הנתונים ברגע שהם מתקבלים, ואחרי זה, הוא שוב חותם ברגע שהוא משדר אותם לצומת השני. כתוצאה מכך, בכל פעם שהמאסטר מקבל בחזרה את הנתונים מהצמתים השונים, הוא קובע את זמן ההשהיה של כל צומת בקלות. העברת הנתונים מהמאסטר משיגה חותמת זמן של I/O מכל צומת כדי להפוך את EtherCAT לדטרמיניסטי ומדויק הרבה יותר.

סובלנות התקלות פירושה, הרשתות של EtherCAT אינן חייבות להיות מחוברות לרשת טבעתית כפי שמוצג בתרשים לעיל, אולם ניתן לחבר אותה בדרכים שונות, כמו טופולוגיית עצים, טופולוגיית קו, טופולוגיית טבעת, טופולוגיית כוכבים וגם עם שילובים.
כמובן שבין העבדים והאדון, חייב להיות נתיב חיבור. ברגע שאתה מנתק אותם, הם לא יכולים לעבוד, למרות שטופולוגיית הרשת גמישה מאוד וסובלת שגיאות ברמה מצוינת.
במערכות EtherCAT, המתגים אינם נחוצים כמו מה שמצאנו ב-Ethernet. אורכי הכבלים בין צמתים עד 100 מטר ניתנים להשגה. איתות ההפרש במתח נמוך בכבלי הנחושת המעוותים פועל במהירויות מקסימליות עם צריכת חשמל נמוכה מאוד. לכן, ניתן גם להשתמש בכבלי סיבים אופטיים (FOCs) כדי לשפר את המהירות ולכלול בידוד גלווני בין מכשירים.
EtherCAT משתמש בכבל Ethernet שיכול להגיע לטווח של עד 100 מטר בין שני צמתים. בנוסף, הפרוטוקול מאפשר העברת נתונים וכוח באמצעות כבל אחד. סוג זה של חיבור משמש לחיבור מכשירים שונים כמו חיישנים עם קו בודד. אם המרחק של הצומת הוא מעל 100 מ', משתמשים בכבל סיבים אופטיים כמו 100BASE-FX. עבור EtherCAT, מגוון חיווטי ה-Ethernet המלא זמין גם כן.
מסגרת EtherCAT
פרוטוקול EtherCAT משתמש במסגרת Ethernet טיפוסית הכוללת מינימום של גרם נתונים אחד או יותר. במסגרת זו, כותרת הנתונים של הנתונים תציין איזה סוג כניסה מכשיר המאסטר ירצה לבצע:
- לקרוא, לכתוב, לקרוא-לכתוב.
- זכות כניסה למכשיר עבד מסוים באמצעות פנייה ישירה או זכות כניסה למכשירי עבדים שונים באמצעות כתובת לוגית.
הכתובת הלוגית משמשת לתהליך של חילופי נתונים מחזוריים כאשר כל Datagram פונה לחלק מדויק של תמונת התהליך בתוך הקטע של פרוטוקול EtherCAT.

לכל מכשיר עבד מוקצים כתובות בודדות או יותר במרחב הכתובות הגלובלי הזה ברחבי הרשת שהוקמה. ניתן לשקול דאטגרם בודד אם למספר התקני עבד מוקצות כתובות באזור דומה.
ב-EtherCAT, ה-Datagrams כוללים את המידע הקשור לגישה לנתונים, כך שהמכשיר הראשי מגיע להחלטה מתי לגשת לנתונים.
בטיחות פרוטוקול
נכון להיום, בטיחות היא אחד המאפיינים העיקריים גם בתחום האוטומציה להעברת נתונים כמו גם לתקשורת. אז, EtherCAT משתמש בפרוטוקול בטיחות למטרות אבטחה על ידי מתן אפשרות למערכת תקשורת בלבד לבטיחות ולשליטה בנתונים. תכונת בטיחות זו גם משנה נתונים בצורה גמישה ומרחיבה את ארכיטקטורת מערכת האבטחה וכו'.
טכנולוגיית הבטיחות של פרוטוקול EtherCAT מאושרת TÜV ופותחה על בסיס IEC 61508 והיא זהה ל-IEC 61784-3. פרוטוקול זה ישים ביישומי בטיחות באמצעות רמת שלמות בטיחות השווה ל-SIL 3.
Ethercat לעומת Ethernet
ההבדלים בין EtherCAT ו-Ethernet נדונים להלן.
|
EtherCAT |
אתרנט |
| EtherCAT היא מערכת Fieldbus המבוססת על Ethernet. | Ethernet היא טכנולוגיית רשת מחשבים קווית. |
| זה ישים גם בדרישות מחשוב רך וגם קשה בזמן אמת בתוך טכנולוגיית אוטומציה. | זה ישים ברשתות LAN, MAN ו-WAN. |
| התקן הבינלאומי של Ethercat הוא IEC 61158 | התקן הבינלאומי של Ethernet הוא IEEE-802.3. |
| זה דורש פעולת מאסטר/עבד. | זה לא דורש פעולת מאסטר/עבד. |
| זה צריך טופולוגיה מבוססת טבעת. | זה לא צריך טופולוגיה מבוססת טבעת. |
| זה מותאם במיוחד לשליטה בזמן אמת. | זה לא מותאם לשליטה בזמן אמת. |
| הוא מותאם להתרחק מהתנגשויות נתונים. | זה לא מותאם להתרחק מהתנגשויות נתונים. |
Ethercat נגד Profinet
ההבדלים בין EtherCAT ל-Profinet נדונים להלן.
|
EtherCAT |
Profinet |
| EtherCAT הוא סוג אחד של פרוטוקול המשמש כדי להביא את הגמישות והעוצמה של Ethernet לאוטומציה תעשייתית, מערכות בקרה בזמן אמת, בקרת תנועה ומערכות רכישת נתונים. | Profinet הוא פרוטוקול תקשורת המשמש להחלפת נתונים בין בקרים והתקנים. |
| EtherCAT מספקת פתרון פתוח בעלות נמוכה מאוד בהשוואה ל-PROFINET IRT וגם ל-SERCOS III. | Profinet לא מספקת פתרון פתוח במחיר נמוך במיוחד. |
| זמן התגובה שלו הוא 0.1ms. | זמן התגובה שלו הוא <1ms. |
| ריצוד Ethercat הוא < 0.1ms. | ריצוד Profinet הוא < 1ms. |
Ethercat נגד CANopen
ההבדלים בין EtherCAT ל-CANopen נדונים להלן.
|
EtherCAT |
יכול לפתוח |
| מהירות האוטובוס ב-Ethercat היא 100 Mbps. | מהירות האוטובוס ב-CANopen היא 1 Mbps. |
| מצב ההעברה בשימוש ב-Ethercat הוא דופלקס מלא. | מצב ההעברה בשימוש ב-CANopen הוא חצי דופלקס. |
| דטרמיניזם או ריצוד בין מכשירים נמוך ב-1ns. | דטרמיניזם או ריצוד בין מכשירים הוא בדרך כלל 100 עד 200 ns. |
| מאסטר יחיד משמש עם עבדים אחד או רבים. | יחיד/רב מאסטר משמש עם עבדים אחד או רבים. |
| המרחק המרבי בין המכשירים הוא 100 מטר. | המרחק המרבי בין מכשירים תלוי בעיקר במהירות האוטובוס. |
| יציאת התקשורת המשמשת כמשני היא USB. | יציאת התקשורת המשמשת כמשני היא RS232. |
Ethercat נגד Modbus
ההבדלים בין EtherCAT לבין מודבוס נדון להלן.
|
EtherCAT |
מודבוס |
| EtherCAT היא מערכת אפיק שדה המבוססת על Ethernet. | Modbus הוא פרוטוקול תקשורת נתונים טורית |
| הוא משתמש בעקרון העיבוד על הזבוב. | הוא משתמש בקווי תקשורת טוריים של תווים. |
| EtherCAT מבוסס על מודל המאסטר והעבד. | Modbus מבוסס על מודל בקשה-תגובה. |
| זה תומך בכל טופולוגיות רשת כִּמעַט. | הוא תומך רק בטופולוגיות קו וכוכבים. |
| Ethercat הוא דטרמיניסטי. | Modbus אינו דטרמיניסטי מכיוון שהוא מבוסס על TCP. |
יתרונות וחסרונות
יתרונות פרוטוקול Ethercat כוללים את הדברים הבאים.
- EtherCAT הוא Fieldbus יוצא דופן המשמש ביישומי בקרת תנועה.
- הוא מאומת למיטוב ביצועי המכונה באמצעות הטופולוגיה הגמישה, הביצועים הדטרמיניסטיים וקבוצת התכונות השונה שלו.
- זה פשוט תומך בכל משפחת CANopen ובפרופיל הכונן של Sercos. אז זה מסייע למשתמשים לארגן רשתות EtherCAT בקלות ליישום המדויק על ידי שינוי פרופילים בסיסיים מוגדרים מראש.
- היתירות שלו אפשרית גם באמצעות טופולוגיית טבעת. EtherCAT משתמש גם בכוכב, עץ, קו ו טופולוגיית אוטובוס .
- פרוטוקול זה מספק מהירות גבוהה, פחות תעבורת נתונים, פחות עלות חומרה ויותר מנגנון דיוק וסנכרון של השעון בהשוואה ל-Ethernet.
- מהירות רשת זו יכולה להיות מנוהלת גם מכיוון שלמחשבים עשויות להיות בעיות להתמודד עם הכמות הטובה יותר של מחזורים, ולכן האופטימיזציה בתוך EtherCAT ניתנת להשגה.
- הוא תומך כמעט בכל הטופולוגיות כך שניתן להשתמש בו במגוון רחב של יישומים עם המתג האופייני מבוסס טופולוגיה של כוכבי Ethernet.
- פרוטוקולי Ethernet מאובטחים מאוד, משתמשים במאסטרים מפושטים, שטח הנתונים גדול יותר, והעיבוד הוא תוך כדי תנועה.
חסרונות פרוטוקול Ethercat כוללים את הדברים הבאים.
- החיסרון העיקרי של EtherCAT הוא שהתקני עבדים דורשים להכניס חומרת ASIC ספציפית לביצוע EtherCAT. מודל הנתונים שלו שונה מאוד וגם קשה מאוד להבנה.
יישומים
ה יישומים של EtherCAT כלול את הבאים.
- ה-EtherCAT ישים בתחומים שונים בשל תכונות רבות כמו ביצועים מצוינים, פשטות, חוסן, סבירות, אבטחה משולבת וטופולוגיה גמישה. הוא משמש בתחומים שונים כמו מכונות, רובוטיקה, מכונות דפוס, מכבשים, תחנות כוח, תחנות משנה, ספסלי בדיקה, מכונות ריתוך, מכונות חקלאיות, מנופים ומעליות, טורבינות רוח, מכונות כרסום, מכונות איסוף ומקום, מכונות אריזה, מדידה מערכות, עבודות ברזל ופלדה, מכונות נייר ועיסה, מערכות בקרת במה, מערכות בקרת מנהרות וכו'.
- זה ישים במדידה של ציוד, מכשירים רפואיים, בקרת מכונות, מכונות ניידות, מערכות משובצות רבות ורכבים.
- יש לו ביצועים גבוהים במיוחד, הוא פשוט להתקנה ופרוטוקול מבוסס שכבת יישומים פתוח המשמש ביישומי Ethernet
- זוהי מערכת תקשורת בזמן אמת ופתוחה, בשימוש כה נרחב בייצור אוטומציה.
לפיכך, זהו סקירה כללית של Ethercat - עבודה עם אפליקציות. EtherCAT הופך מערכות ומכונות לפשוטות יותר, מהירות יותר וחסכוניות יותר. זהו תקן בינלאומי של חברת החשמל שלא מייצג רק יציבות, אלא גם פתיחות: עד כה, מפרטי EtherCAT מעולם לא שונו, אלא הורחבו רק באופן תואם. EtherCAT נחשב ל'Ethernet Fieldbus' מכיוון שהוא ממזג את יתרונות ה-Ethernet עם פשטות מערכות Fieldbus הסטנדרטיות ומונע את מורכבות טכנולוגיות ה-IT. הנה שאלה בשבילך, מה זה Ethernet?