כאשר מהפך עם תפוקת גל מרובע משתנה ליצירת תפוקת גל סינוסית גסה, זה נקרא מהפך גלי סינוס שונה.
המאמר הבא מציג 7 עיצובי מהפך גלי סינוס מעניינים עם תיאורים ממצים לגבי הליך הבנייה שלו, תרשים המעגל, פלט צורת הגל ורשימות חלקים מפורטות. העיצובים מיועדים ללימוד ובניית פרויקטים ניסיוניים על ידי מהנדסים וסטודנטים.
כאן נדון בזנים שונים של עיצובים ששונו, החל מ -100 וואט צנועים ומודל פלט כוח מסיבי של 3 קילוואט.
כיצד עובדים ממירים מהונדסים
אנשים חדשים בתחום האלקטרוניקה עשויים להתבלבל מעט ביחס להבדל בין גל מרובע למהפך גל מרובע שונה. ניתן להבין זאת באמצעות ההסבר הקצר הבא:
כפי שכולנו יודעים מהפך תמיד ייצר זרם חילופין (AC) הדומה למתח קו החשמל המקומי שלנו, כך שהוא יכול להחליף אותו במהלך כשלים בחשמל. AC במילים פשוטות הוא בעצם עלייה וירידה של מתח בסדר גודל מסוים.
עם זאת, באופן אידיאלי AC זה אמור להתקרב ככל האפשר לגל סינוס כמוצג להלן:

ההבדל הבסיסי בין צורת גל סינוס לצורת גל מרובעת
עלייה ונפילה של מתח זה קורה בקצב מסוים כלומר במספר פעמים מסוים לשנייה, המכונה תדר שלו. כך למשל AC 50 הרץ פירושו 50 מחזורים או 50 עליות וירידות של מתח מסוים בשנייה אחת.
בגל סינוס AC כפי שנמצא בשקע החשמל הביתי הרגיל שלנו העלייה והנפילה של המתח הנ'ל הם בצורה של עקומה סינוסואידית, כלומר הדפוס שלה משתנה בהדרגה עם הזמן ולכן אינו פתאומי או פתאומי. מעברים חלקים כאלה בצורת הגל AC הופכים למתאימים מאוד וסוג אספקה מומלץ עבור הגאדג'טים האלקטרוניים הרבים כמו טלוויזיות, מערכות מוסיקה, מקררים, מנועים וכו '.
עם זאת, בתבנית גל מרובעת העליות והירידות במתח הן מיידיות ופתאומיות. עלייה ונפילה מיידית של פוטנציאל כזה יוצרת קוצים חדים בשולי כל גל וכך הופכת להיות מאוד לא רצויה ולא מתאימה לציוד אלקטרוני מתוחכם. לכן תמיד מסוכן להפעיל אותם באמצעות אספקת מהפך מארג מרובע.

צורת גל שונה
בתכנון גלי ריבועי שונה כפי שמוצג לעיל, צורת צורת הגל המרובעת בעצם נשארת זהה אך גודל כל קטע של צורת הגל מימד כראוי כך שערכו הממוצע תואם מקרוב לערך הממוצע של צורת גל AC.
כפי שאתה יכול לראות שיש כמות פרופורציונאלית של שטחי פער או אפס בין כל גושי ריבוע, פערים אלה מסייעים בסופו של דבר לעצב את הגלים המרובעים האלה לגלי סינוס כמו פלט (אם כי באופן גס).
ומה אחראי על התאמת הגלים המרובעים הממדים הללו לתכונות דמויי גידים? ובכן, זהו המאפיין הגלום של האינדוקציה המגנטית של השנאי אשר מגולף ביעילות את מעברי 'זמן המת' בין גושי הגל המרובעים לגלים הנראים גל סינוס, כמוצג להלן:

בכל 7 העיצובים שהוסברו להלן אנו מנסים ליישם תיאוריה זו ולהבטיח שערך ה- RMS של הגלים המרובעים נשלט על ידי קיצוץ של פסגות 330V ל- 220V RMS שונה. ניתן להחיל את אותו הדבר על 120 וולט AC על ידי קיצוץ 160 הפסגות.
כיצד לחשב באמצעות נוסחאות קלות
אם אתה מעוניין לדעת כיצד לחשב את צורת הגל המתוקנת לעיל כך שתביא לשכפול כמעט אידיאלי של גלי סינוס, אנא עיין בהודעה הבאה להדרכה המלאה:
חישב ערך שווה ערך RMS סינוס גל שונה
תכנון מס '1: שימוש ב- IC 4017
בואו נבדוק את עיצוב המהפך ששונה הראשון שהוא פשוט למדי ומשתמש ב- IC 4017 יחיד לעיבוד צורת הגל המתוקנת הנדרשת.
אם אתה מחפש מעגל מהפך מהפך של גל סינוס שונה בקלות לבנייה, אולי הרעיון הבא יעניין אותך. זה נראה מדהים עלות פשוטה ונמוכה עם פלט שבמידה רבה ניתן להשוות עם מקבילים אחרים בגלי סינוס מתוחכמים יותר.
אנו יודעים שכאשר מוחל קלט שעון על הסיכה מס '14 שלו, ה- IC מייצר פעולות גבוהות של לוגיקה של מעגל הסטה דרך 10 פינות הפלט שלו.
כשמסתכלים על דיאגרמת המעגל אנו מגלים שהמוצא הסיכות של ה- IC מסתיים בכדי לספק את בסיס טרנזיסטורי המוצא כך שהם מתנהלים לאחר כל דופק יציאה חלופי מה- IC.
זה קורה פשוט מכיוון שבסיסי הטרנזיסטורים מחוברים לסירוגין למוצא סיכות ה- IC וחיבורי ההצמדה הבינוניים פשוט מסולקים או נשמרים פתוחים.
פיתולי השנאי המחוברים לקולט הטרנזיסטור מגיבים למיתוג הטרנזיסטור החלופי ומייצרים זרם זרם מוגבר בתפוקתו בעל צורת גל בדיוק כפי שמוצג בתרשים.
הפלט של מהפך כוח גל סינוס שונה זה אמנם לא ממש בהשוואה לפלט של מהפך גל סינוס טהור אך בהחלט יהיה טוב בהרבה מזה של מהפך רגיל של גל מרובע. יתר על כן הרעיון קל מאוד וזול לבנייה. 
אזהרה: אנא התחבר לדיודי הגנה על פולט האספן של הטרנזיסטור TIP35 (קטגוריה לאספן, דרך לפולט)
עדכון: בהתאם לחישובים המוצגים ב המאמר הזה , ניתן להגדיר באופן אידיאלי את סיכות הפלט IC 4017 להשגת מהפך גלי סינוס שונה ומרשים.
ניתן לראות את התמונה ששונתה למטה:

אזהרה: אנא התחבר לדיודי הגנה על פולט האספן של הטרנזיסטור TIP35 (קטגוריה לאספן, דרך לפולט)
הדגמת וידאו:
מפרט מינימלי
- קלט: 12V מסוללת חומצה עופרת, לדוגמא 12V סוללה 7Ah
- פלט: 220 וולט או 120 וולט בהתאם לדירוג השנאי
- צורת גל: גל סינוס שונה
משוב מאחת הצופות המסורות בבלוג זה, גב 'שרה
שלום סוואגאטם,
זה מה שהשגתי מפלט נגדי הפוסט IC4 R4 ו- R5. כפי שאמרתי קודם ציפיתי שיהיה גל דו קוטבי. אחד בחיוב והשני בשלילה. לדמות מחזור גלי זרם זרם. אני מקווה שהתמונה הזו תעזור. אני צריך דרך קדימה בבקשה.
תודה

תשובתי:
שלום שרה,
יציאות ה- IC לא יציגו גלים דו-קוטביים מכיוון שהאותות מיציאות אלה מיועדים לטרנזיסטורים זהים מסוג N ומתוך אספקה אחת .... זהו השנאי שאחראי ליצירת הגל הדו-קוטבי בפלטו מכיוון שהוא מוגדר באמצעות דחיפה. -משוך טופולוגיה באמצעות ברז מרכז .... אז מה שאתה רואה על פני R4 ו- R5 הוא צורת גל נכונה. אנא בדוק את צורת הגל בפלט השנאי לאימות אופיו הדו קוטבי של צורת הגל.
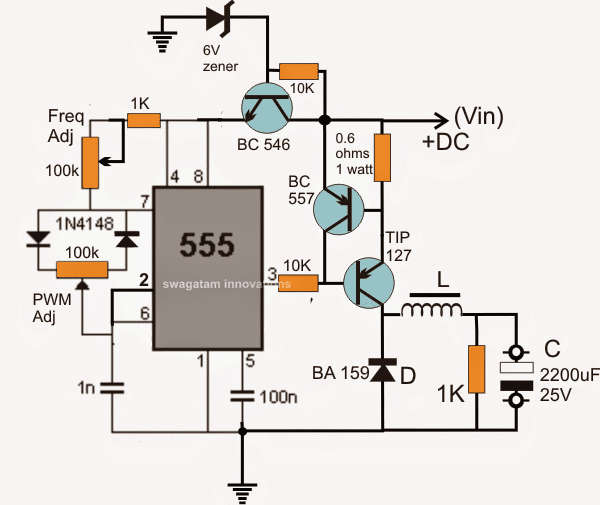
עיצוב מס '2: שימוש בשערים לא
השנייה ברשימה היא תפיסה ייחודית של מהפך גל סינוס שונה, שתכנן אותי. את כל היחידה יחד עם שלב המתנד ואת שלב הפלט יכולים לבנות כל חובב אלקטרוני בבית. המתוכנן שתוכנן יוכל בקלות לתמוך בעומס פלט של 500 VA.
בואו ננסה להבין את המעגל המתפקד בפרטים:
במת המתנד:
כשמסתכלים על דיאגרמת המעגל לעיל, אנו רואים עיצוב מעגלים חכם המורכב משניהם, המתנד וגם תכונת האופטימיזציה של PWM כלולה.
כאן מחברים את השערים N1 ו- N2 כמתנד, שמייצר בעיקר פולסי גל מרובעים אחידים לחלוטין בתפוקתו. התדר נקבע על ידי התאמת ערכים של 100K המשויכים וקבל 0.01 uF. בתכנון זה הוא קבוע בקצב של סביב 50 הרץ. ניתן לשנות את הערכים כראוי לקבלת פלט של 60 הרץ.
הפלט מהמתנד מוזרם לשלב המאגר המורכב מארבעה שערים לא מקבילים ומסודרים לסירוגין. המאגרים משמשים לקיום פולסים מושלמים ולמניעת השפלה.
הפלט מהמאגר מוחל על שלבי הדרייבר, כאשר שני הטרנזיסטורים הדרלינגטון בעלי הספק גבוה לוקחים את האחריות להגברת הפולסים שהתקבלו, כך שניתן יהיה להזין אותו לבסוף לשלב הפלט של תכנון מהפך זה של 500 VA.
עד לנקודה זו התדר הוא רק גל מרובע רגיל. עם זאת הכנסת שלב IC 555 משנה לחלוטין את התרחיש.
IC 555 ורכיביו המשויכים מוגדרים כמחולל PWM פשוט. ניתן לכוון באופן דיסקרטי את יחס מרווח המרווח של ה- PWM בעזרת הסיר 100K.
פלט ה- PWM משולב ביציאת שלב המתנד באמצעות דיודה. סידור זה מוודא כי פולסי הגל המרובע שנוצרו נשברים לחתיכות או נקצצים לפי הגדרת פולסי ה- PWM.
זה עוזר בהפחתת ערך ה- RMS הכולל של פולסי הגל המרובעים ובאופטימיזציה שלהם קרוב ככל האפשר לערך RMS של גל סינוס.
הפולסים הנוצרים בבסיסי טרנזיסטורי הנהג משתנים באופן מושלם כך שהם דומים טכנית לגל סינוס.

שלב הפלט:
שלב הפלט הוא די ישר בעיצובו. שני סלילת השנאי מוגדרים לשני הערוצים האישיים, המורכבים מבנקים של טרנזיסטורי כוח.
טרנזיסטורי הכוח בשני הגפיים מסודרים במקביל להגדלת הזרם הכולל באמצעות הסלילה כדי לייצר את 500 וואט ההספק הרצויים.
עם זאת, כדי להגביל מצבים של בריחה תרמית עם החיבורים המקבילים, הטרנזיסטורים מחוברים עם נגע פצע תיל בעל ערך נמוך, גבוה בפולטים שלהם. זה מעכב כל טרנזיסטור בודד מלהיות עמוס וליפול למצב הנ'ל.
בסיסי המכלול משולבים בשלב הנהג שנדון בסעיף הקודם.

הסוללה מחוברת על פני הברז המרכזי ואדמת השנאי וגם לנקודות הרלוונטיות במעגל.
הפעלת מתח מופעלת מיד את המהפך, ומספק AC סינוס עשיר שונה בפלט שלו, מוכן לשימוש עם כל עומס של עד 500 VA.
פרטי הרכיב מוצגים בתרשים עצמו.
ניתן לשנות את העיצוב הנ'ל לממיר מהפך גל סינוס מבוקר PWM בשליטת 500 וואט על ידי החלפת טרנזיסטורי הנהג פשוט בכמה מוספטים. התכנון המוצג להלן יספק כ -150 וואט חשמל, לקבלת 500 וואט, ייתכן שיהיה צורך בחיבור של מספר מוספטים במקביל לשני המוספטים הקיימים.

תכנון מס '3: שימוש ב- IC 4093 לתוצאות שהשתנו
מעגל מהפך גל הסינוס ששונה מבוקר PWM המוצג להלן הוא המתמודד השלישי שלנו, הוא משתמש רק ב- 4093 יחיד עבור הפונקציות שצוינו.
ה- IC מורכב מארבעה שערי NAND, מתוכם שני מחוברים כמתנדים, בעוד שהשניים הנותרים כמאגרים.
המתנדים משולבים בצורה כזו שהתדר הגבוה מאחד המתנדים מקיים אינטראקציה עם התפוקה של האחר, ויוצר גלים מרובעים קצוצים שניתן להתאים היטב את ערך ה- RMS שלהם כך שיתאים לצורות הגל הסינוסיות הרגילות. להבין או לבנות, במיוחד כאשר זה מורכב כמו סוגי גלי סינוס שהשתנו. עם זאת הרעיון הנדון כאן משתמש רק ב- IC 4093 יחיד לטיפול בכל הסיבוכים הנדרשים. בואו ללמוד כמה זה פשוט לבנות.
חלקים אתה Ned לבנות מעגל מהפך 200 וואט
כל הנגדים הם 1/4 ואט, 5%, אלא אם כן צוין אחרת.
- R1 = 1 מ 'ל 50 הרץ ו 830 ק ל 60 הרץ
- R2 = 1 K,
- R3 = 1 מיליון,
- R4 = 1 K,
- R5, R8, R9 = 470 אוהם,
- R6, R7 = 100 אוהם, 5 וואט,
- VR 1 = 100 K,
- C1, C2 = 0.022 uF, דיסק קרמי,
- C3 = 0.1, קרמיקה דיסקית
- T1, T4 = טיפ 122
- T3, T2 = BDY 29,
- N1, N2, N3, N4 = IC 4093,
- D1, D1, D4, D5 = 1N4007,
- D3, D2 = 1N5408,
- שנאי = 12 -0 - 12 וולט, זרם בין 2 ל -20 אמפר לפי הצורך, מתח היציאה יכול להיות 120 או 230 וולט לפי מפרט המדינה.
- מומלץ להשתמש בסוללה = 12 וולט, בדרך כלל מסוג 32 AH, לשימוש במכוניות.

מבצע מעגל
התכנון המוצע של מהפך גלי סינוס ששונה על ידי 200 וואט משיג את תפוקתו המתוקנת על ידי 'חיתוך' של פולסי הגל המרובע הבסיסיים לחלקים קטנים יותר של פעימות מלבניות. הפונקציה דומה לבקרת PWM, המשויכת בדרך כלל ל- IC 555.
עם זאת, כאן לא ניתן לשנות את מחזורי החובה בנפרד והם נשמרים שווים בכל טווח הווריאציות הזמין. המגבלה אינה משפיעה רבות על פונקציית ה- PWM, מכיוון שכאן אנו עוסקים רק בשמירת ערך ה- RMS של הפלט קרוב לדלפק גלי הסינוס שלו, המבוצע בצורה מספקת באמצעות התצורה הקיימת.
בהתייחס לתרשים המעגל, אנו יכולים לראות כי כל האלקטרוניקה מרחפת סביב חלק פעיל אחד - IC 4093.
הוא מורכב מארבעה שערי NAND שמיט בודדים, כולם עוסקים בפונקציות הנדרשות.
N1 יחד עם R1, R2 ו- C1 יוצרים מתנד קלאסי מסוג CMOS Schmitt trgger כאשר השער מוגדר בדרך כלל כמהפך או כ- NOT שער.
הפולסים הנוצרים משלב מתנד זה הם גלים מרובעים המהווים את פעימות ההנעה הבסיסיות של המעגל. N3 ו- N4 מחוברים כחוצצים ומשמשים להפעלת מכשירי הפלט במקביל.
עם זאת מדובר בפולסים רגילים של גל מרובע ואינם מהווים את הגרסה המתוקנת של המערכת.
אנו יכולים להשתמש בפולסים לעיל אך ורק להפעלת המהפך שלנו, אך התוצאה תהיה מהפך גל מרובע רגיל, שאינו מתאים להפעלת גאדג'טים אלקטרוניים מתוחכמים.
הסיבה לכך היא שגלים מרובעים עשויים להיות שונים מאוד מצורות הגל הסינוסיות, במיוחד בכל הנוגע לערכי ה- RMS שלהם.
לכן, הרעיון הוא לשנות את צורות הגל המרובעות שנוצרו כך שערך ה- RMS שלו יתאים באופן הדוק לצורת גל סינוס. לשם כך עלינו לממד את צורות הגל המרובעות הבודדות באמצעות התערבות חיצונית כלשהי.
החלק המורכב מ- N2, יחד עם שאר החלקים הקשורים C2, R4 ו- VR1, יוצר מתנד דומה נוסף כמו N1. עם זאת מתנד זה מייצר תדרים גבוהים יותר שצורתם מלבנית גבוהה.
הפלט המלבני מ- N2 מוזן למקור הקלט הבסיסי של N3. לרכבות הפולסים החיוביות אין השפעה על פעימות הכניסה למקור בגלל נוכחות D1 החוסמת את התפוקות החיוביות מ- N2.
עם זאת, הפולסים השליליים מותרים על ידי D1 ואלה משקעים ביעילות את החלקים הרלוונטיים בתדר המקור הבסיסי, ויוצרים סוג של חריצים מלבניים בהם במרווחי זמן קבועים בהתאם לתדירות המתנד שנקבע על ידי VR1.
ניתן למטב את החריצים הללו או ליתר דיוק את הפולסים המלבניים מ- N2 על ידי התאמת VR1.
הפעולה הנ'ל חותכת את הגל הריבועי הבסיסי מ- N1 לחלקים צרים בדידים, ומורידה את ה- RMS הממוצע של צורות הגל. מומלץ שההגדרה נעשית בעזרת מד RMS.
התקני הפלט מחליפים את פיתולי השנאי הרלוונטיים בתגובה לפולסים מימדים אלה ומייצרים צורות גל המתאימות במתח גבוה בפלטת הפלט.
התוצאה היא מתח שווה ערך לאיכות גלי סינוס והוא בטוח להפעלת כל סוגי הציוד החשמלי הביתי.
ניתן להגדיל את כוח המהפך מ- 200 וואט ל -500 וואט או לפי הצורך פשוט על ידי הוספת מספרים נוספים של T1, T2, R5, R6 ו- T3, T4, R7, R8 במקביל לנקודות הרלוונטיות.
תכונות בולטות של המהפך
המעגל יעיל באמת ויתרה מכך מדובר בגרסת גלי סינוס שונה אשר הופכת אותו למצטיין בכבודו שלו.
המעגל משתמש בסוגי רכיבים רגילים מאוד, קלים לרכישה, והוא גם זול מאוד לבנייה.
תהליך השינוי של הגלים המרובעים לגלי סינוס יכול להיעשות על ידי שינוי פוטנציומטר יחיד או ליתר דיוק קביעה מוגדרת מראש, מה שהופך את הפעולות למדי פשוטות.
הרעיון בסיסי מאוד אך מציע תפוקות הספק גבוהות אשר עשויות להיות מותאמות בהתאם לצרכים שלו רק על ידי הוספת מספר נוסף של התקני פלט במקביל ועל ידי החלפת הסוללה והשנאי בגדלים הרלוונטיים.
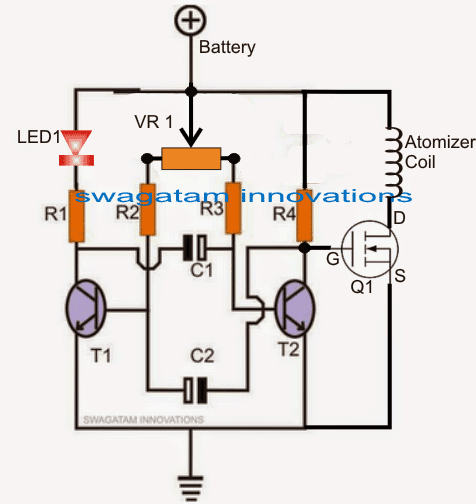
תכנון מס '4: גלי סינוס מבוססי טרנזיסטור לחלוטין
מעגל מעניין מאוד של מהפך גלי סינוס שונה נדון במאמר זה המשלב טרנזיסטורים רגילים בלבד ליישומים המוצעים.
השימוש בטרנזיסטורים בדרך כלל הופך את המעגל לקל יותר להבנה וידידותי יותר עם חובבי האלקטרוניקה החדשים. הכללת בקרת PWM במעגל הופכת את התכנון ליעיל ורצוי מאוד בכל הנוגע לפעולות של מכשירים מתוחכמים ביציאת המהפך. תרשים המעגל מראה כיצד המעגל כולו מונח. אנו יכולים לראות בבירור שרק טרנזיסטורים היו מעורבים ובכל זאת ניתן לגרום למעגל לייצר צורת גל מבוקרת PWM המיוצרת ליצירת צורות גל הגידים המתוקנות הנדרשות או ליתר דיוק גלים מרובעים.
ניתן להבין את כל הרעיון על ידי לימוד המעגל בעזרת הנקודות הבאות:
יציב כמו המתנדים
בעיקרון אנו יכולים להיות עדים לשני שלבים זהים המחוברים בתצורת המולטיברטור הרגילה.
בהיותם יציבים באופיים התצורות מיועדות במיוחד ליצירת פולסים רצים חופשיים או גל מרובע בתפוקות שלהם.
עם זאת שלב ה- AMV העליון ממוקם ליצירת הגלים המרובעים הרגילים של 50 הרץ (או 60 הרץ) המשמשים להפעלת השנאי ולפעולות המהפך הנדרשות, על מנת לקבל את עוצמת הרשת החשמלית הרצויה ביציאה.
לכן אין שום דבר רציני או מעניין בשלב העליון, בדרך כלל הוא מורכב משלב AMV מרכזי המורכב מ- T2, T3, ואז מגיע שלב הנהג המורכב מהטרנזיסטורים T4, T5 ולבסוף שלבי הפלט המקבלים המורכבים מ- T1 ו- T6.
איך עובד שלב הפלט
שלב הפלט מניע את השנאי באמצעות כוח הסוללה לפעולות המהפך הרצויות.
השלב הנ'ל אחראי רק לביצוע הדור של פעימות הגל המרובעות הנדרש באופן מוחלט לפעולות ההיפוך הרגילות המיועדות.
שלב ה- AMV של צ'ופר PWM
המעגל במחצית התחתונה הוא הקטע שלמעשה מבצע את שינויי גלי הסינוס על ידי החלפת ה- AMV העליון בהתאם להגדרות ה- PWM שלו.
בדיוק, צורת הדופק של שלב ה- AMV העליון נשלטת על ידי מעגל ה- AMV התחתון והיא מיישמת את שינוי הגל המרובע על ידי חיתוך הגלים הריבועיים המהפכים הבסיסיים מה- AMV העליון לחלקים בדידים.
החיתוך או המימד לעיל מבוצע ומוגדר על ידי הגדרת ה- R12 הקבועה מראש.
R12 משמש להתאמת יחס מרחב הסימנים של הפולסים הנוצרים על ידי ה- AMV התחתון.
על פי פעימות PWM אלה, הגל המרובע הבסיסי מה- AMV העליון נחתך לחלקים וערך ה- RMS הממוצע של צורת הגל שנוצרה מותאם ככל האפשר לצורת גל סינוס רגילה.

ההסבר שנותר בנוגע למעגל הוא די רגיל וניתן לעשות זאת על ידי ביצוע הנוהג הסטנדרטי הנהוג בדרך כלל בעת בניית הפוך, או לצורך העניין, ניתן להפנות את המאמר הנוגע אחר שלי לצורך קבלת המידע הרלוונטי.
רשימת חלקים
- R1, R8 = 15 אוהם, 10 וואט,
- R2, R7 = 330 OHMS, 1 וואט,
- R3, R6, R9, R13, R14 = 470 OHMS ½ וואט,
- R4, R5 = 39K
- R10, R11 = 10K,
- R12 = 10K קבוע מראש,
- C1 ----- C4 = 0.33Uf,
- D1, D2 = 1N5402,
- D3, D4 = 1N40007
- T2, T3, T7, T8 = 8050,
- T9 = 8550
- T5, T4 = טיפ 127
- T1, T6 = BDY29
- שנאי = 12-0-12 וולט, 20 אמפר.
- T1, T6, T5, T4 צריך להיות מותקן מעל כיור קירור מתאים.
- סוללה = 12V, 30AH
תכנון מס '5: מעגל מהפך דיגיטלי שונה
העיצוב החמישי הזה של מהפך שונה קלאסי הוא עיצוב נוסף שפותח על ידי, למרות שהוא גל סינוס שונה, ניתן לכנות אותו גם כמעגל מהפך דיגיטלי של גל סינוס.
הרעיון שואב השראה מעיצוב מגבר שמע חזק ומבוסס על ידי mosfet.
כשמסתכלים על עיצוב מגבר ההספק הראשי נוכל לראות שבעצם מדובר במגבר שמע בעל עוצמה של 250 וואט, ששונה ליישום מהפך.
כל השלבים המעורבים נועדו למעשה לאפשר תגובת תדרים של 20 עד 100 קילוהרץ, אם כי כאן לא נצטרך רמה כה גבוהה של תגובת תדרים, לא ביטלתי אף אחד מהשלבים מכיוון שהוא לא יזיק למעגל. .
השלב הראשון המורכב מטרנזיסטורים BC556 הוא שלב המגבר הדיפרנציאלי, בשלב הבא מגיע שלב הנהג המאוזן היטב המורכב מהטרנזיסטורים BD140 / BD139 ולבסוף זהו שלב הפלט המורכב מהמושטים החזקים.
הפלט מה mosfets מחובר לשנאי כוח לפעולות המהפך הנדרשות.
זה משלים את שלב מגבר ההספק, אולם שלב זה דורש קלט ממדי היטב, אלא כניסת PWM שתסייע בסופו של דבר ליצירת תכנון מעגל המהפך של גלי הסינוס הדיגיטלי המוצע.
במת המתנד
DIAGRAM CIRCUIT הבא מציג שלב מתנד פשוט שהותאם למותאם לספק אספקות מתכווננות מבוקרות PWM.
IC 4017 הופך לחלק העיקרי של המעגל ויוצר גלים מרובעים התואמים מאוד לערך RMS של אות AC רגיל.
עם זאת, לצורך התאמות מדויקות, הפלט מה- IC 4017 סופק עם מתקן ברמת התאמת מתח דיסקרטי תוך שימוש בכמה דיודות 1N4148.
ניתן לבחור אחת מהדיודות ביציאה להפחתת משרעת אות הפלט שתסייע בסופו של דבר בהתאמת רמת ה- RMS של פלט השנאי.
תדר השעון אשר חייב להיות מותאם ל- 50Hz או 60Hz בהתאם לדרישות נוצר על ידי שער יחיד מה- IC 4093.
ניתן להגדיר P1 להפקת התדר הנדרש לעיל.
לקבלת 48-0-48 וולט, השתמש בארבע מספר. סוללות 24V / 2AH בסדרה, כפי שמוצג באיור האחרון.
מעגל מהפך כוח

מעגל מתנד שווה גל


האיור שלהלן מציג תפוקות צורות גל שונות בהתאם לבחירת מספר הדיודות בפלט שלב המתנד, צורות הגל עשויות להיות בעלות ערכי RMS רלוונטיים שונים, אותם יש לבחור בקפידה לצורך הזנת מעגל מהפך הכוח.

אם יש לך בעיות בהבנת המעגלים הנ'ל, אל תהסס להגיב ולברר.
תכנון מס '6: באמצעות 3 IC 555 בלבד
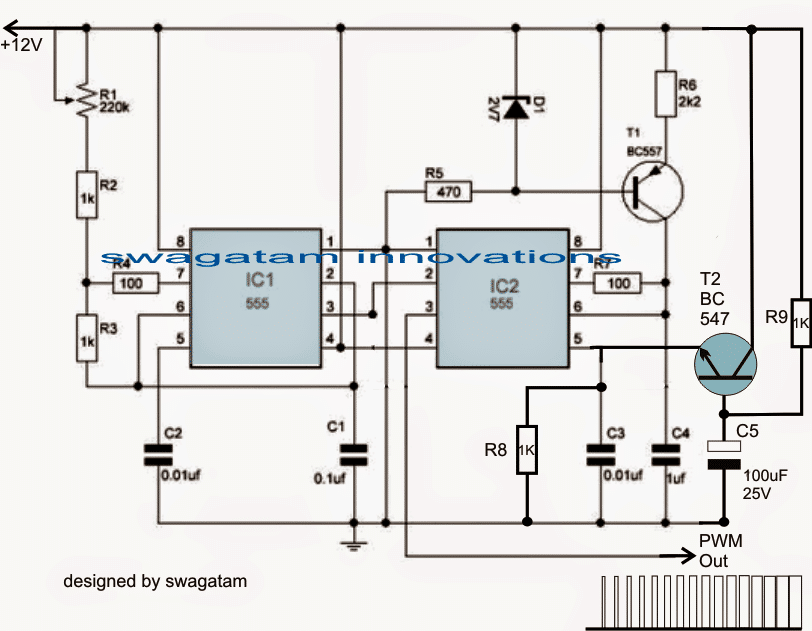
הסעיף הבא דן במעגל המהפך השישי בגלישת סינוס ששונה בצורה הטובה ביותר עם תמונות צורת גל, המאשר את אמינות התכנון. הרעיון תוכנן על ידי, וצורת הגל אושרה והוגשה על ידי מר רובין פיטר.
הרעיון הנדון תוכנן והוצג בכמה מההודעות שלי שפורסמו בעבר: מעגל מהפך של גל סינוס 300 וואט ומעגל מהפך 556 אולם מכיוון שצורת הגל לא אושרה על ידי, המעגלים הרלוונטיים לא היו חסינים בפני שוטים לחלוטין. עכשיו זה נבדק, וצורת הגל שאומתה על ידי מר רובין פיטר, הנוהל גילה פגם נסתר אחד בתכנון שתקווה היה מסודר כאן.
בוא נעבור את שיחת הדוא'ל הבאה ביני לבין מר רובין פיטר.
בניתי את הגרסה החלופית המהירה יותר של גל סינוס IC555, ללא טרנזיסטור. שיניתי חלק מערכי הנגדים והמכסים ולא השתמשתי ב- [D1 2v7, BC557, R3 470ohm]
הצטרפתי ל- Pin2 & 7 של IC 4017 יחד כדי לקבל את צורת הגל הנדרשת. IC1 מייצר את פולסי מחזור החובה של 90% (תמונה אחת), שעונים על IC2 (2 תמונות) ולכן IC3 (2 תמונות, מחזור עבודה מינימלי ומקסימום D / C) האם אלה התוצאות הצפויות, החשש שלי הוא שזה סינוס שונה בו ניתן לשנות את
RMS, לא סינוס טהור
בברכה
אָדוֹם הַחֲזֶה




היי רובין,
תרשים מעגל גלי הסינוס שהשתנה שלך נראה תקין אך צורת הגל אינה, לדעתי נצטרך להשתמש בשלב מתנד נפרד לשעון 4017 עם תדר קבוע 200Hz, ולהגדיל את תדירות ה- IC 555 העליונה ביותר לקילו-הרץ. ואז בדוק את צורת הגל.
היי סווגתם
צירפתי סכמטי מעגל חדש עם השינויים שהצעת יחד עם צורות הגל שהתקבלו. מה אתה חושב על צורת הגל PWM, נראה כי הפולסים לא יורדים כל הדרך לקרקע
רָמָה.
בברכה





היי רובין,
זה נהדר, בדיוק מה שציפיתי, אז זה אומר שיש להשתמש בתכנית נפרדת עבור IC 555 האמצעי לתוצאות המיועדות .... אגב, שינית את הגדרת RMS המוגדרת מראש ובדקת את צורות הגל, אנא עדכן על ידי ביצוע כך.
אז עכשיו זה נראה הרבה יותר טוב ותוכלו להמשיך בעיצוב המהפך על ידי חיבור המוספטים.
.... זה לא מגיע לקרקע בגלל הירידה של 0.6 וולט, אני מניח .... תודה רבה
למעשה ניתן לבנות מעגל קל בהרבה עם תוצאות דומות כנ'ל, כפי שנדון בפוסט זה: https: //homemade-circuits.com/2013/04/how-to-modify-square-wave-inverter-into.html
עדכונים נוספים מאת מר רובין
היי סווגתם
הגדלתי את הגדרת ה- RMS המוגדרת מראש והנה צורות הגל המצורפות. ברצוני לשאול אותך איזו משרעת של גל המשולש תוכל להחיל על סיכה 5, וכיצד תסנכרן אותה כך שכאשר סיכה 2 או 7 עוברים + השיא נמצא ב אֶמצַע
בברכה רובין


הנה צורת גל סינוס שונה יותר, אולי הבחור יבין אותם קל יותר. זה תלוי בך אם אתה מפרסם אותם.
אגב לקחתי מכסה 10uf מפיץ 2 לנגד 10k לכובע .47uf לקרקע. והגל המשולש נראה ככה (תואם). לא משולש מדי, 7v p-p.
אבדוק את אפשרות 4047
מריע רובין



פלט גל פלט על פני פלט רשת שנאי (220 וולט) התמונות הבאות מציגות את תמונות צורת הגל השונות שצולמו מכל סליל הרשת המוצא של השנאי.
באדיבות - רובין פיטר
ללא PWM, ללא עומס

ללא PWM, עם עומס

עם PWM, ללא עומס

עם PWM, עם עומס

התמונה לעיל הוגדלה

תמונות צורת הגל הנ'ל נראו מעוותות במקצת ולא ממש כמו גלי סינוס. הוספת קבלים של 0.45uF / 400V על פני הפלט שיפרה את התוצאות באופן דרסטי, כפי שניתן לראות מהתמונות הבאות.
ללא עומס, עם PWM ON, נוסף קבלים 0.45uF / 400v

עם PWM, עם עומס, ועם קבל פלט, זה נראה מאוד כמו צורת סינוס אותנטית.

כל האימות והבדיקות הנ'ל נערכו על ידי מר רובין פיטרס.
דיווחים נוספים ממר רובין
אוקי, עשיתי עוד אמש ניסויים והתנסיתי וגיליתי שאם אני מגדיל את מתח הקרב ל 24 וולט גל הסינוס לא מעוות כאשר הגדלתי את החובה / מחזור. (בסדר, חזרתי לביטחון שלי) הוספתי את הכובע של 2200uf בין c / tapp לקרקע, אבל זה לא השפיע על צורת גל הפלט.
שמתי לב לכמה דברים שהתרחשו, כאשר הגדלתי את ה- D / C, הטראפו משמיע קול זמזום רועש (כאילו ממסר רוטט קדימה ואחורה מהר מאוד), ה- IRFZ44N מתחמם מהר מאוד גם ללא עומס כאשר אני מסיר נראה כי המכסה שם פחות לחץ על המערכת. רעש הזמזום לא כל כך גרוע וה- Z44n לא נהיה כל כך חם. [כמובן שאין גידים}
המכסה נמצא על פני פלט הטרפו ולא בסדרה עם רגל אחת. הוצאתי (3 פיתולים שונים) משרנים עגולים (אני חושב שהם טוריים) מתוך אספקת חשמל במתג. התוצאה לא הייתה שיפור בגל הפלט (ללא שינוי),
גם מתח המוצא של טראפו ירד.
הוספת תכונת תיקון עומסים אוטומטית לרעיון המעגל המהפך של גלי הסינוס לעיל:

במעגל המודעות הפשוט המוצג לעיל ניתן להשתמש כדי לאפשר תיקון מתח אוטומטי של פלט המהפך.
המתח המוזן על פני הגשר מתוקן ומופעל על בסיס הטרנזיסטור NPN. ההגדרה הקבועה מראש מותאמת כך שבלא עומס מתח היציאה מסתדר ברמה הרגילה הנקובה.
ליתר דיוק, בהתחלה יש לשמור את הגדרה המוגדרת מראש לעיל בגובה הקרקע כך שהטרנזיסטור אומר כבוי.
לאחר מכן, יש לכוונן את הגדרת RMS המוגדרת מראש 10k בסיכה מספר 5 של ה- PWM 555 IC כדי ליצור כ -300 וולט בפלט השנאי.
לבסוף, יש לייצב מחדש את הגדרת התיקון המוגדרת מראש 220K כדי להוריד את המתח לסיבוב של 230 וולט.
בוצע! יש לקוות שההתאמות לעיל יספיקו להגדרת המעגל לתיקוני העומס האוטומטיים המיועדים.
העיצוב הסופי עשוי להיראות כך:

מעגל סינון
ניתן להשתמש במעגל הפילטר הבא בפלט של המזמין לעיל לשליטה בהרמוניות ולהגברת תפוקת סינוס נקייה יותר.

תשומות נוספות:
התכנון הנ'ל נחקר ושופר עוד יותר על ידי מר תיאופנקיס, שהוא גם קורא נלהב של בלוג זה.

עקבות האוסצילוסקופ מתארים את צורת הגל המתמרת של המהפך על פני הנגד 10k המחובר ביציאת הרשת של השנאי.


עיצוב המהפך ששונה לעיל על ידי מהפך Theofanakis נבדק ואושר על ידי אחד העוקבים הנלהבים של הבלוג הזה, מר אודון. תמונות הבדיקה הבאות מאת אודון מאששות את טבע הגו של מעגל המהפך לעיל.

עיצוב מס '7: עיצוב מהפך שונה 3Kva בעומס כבד
התוכן שהוסבר להלן חוקר אב טיפוס של מעגל מהפך של גל סינוס 3kva שנעשה על ידי מר מרסלין תוך שימוש רק ב- BJT במקום במוספטים המקובלים. מעגל הבקרה PWM תוכנן על ידי.
באחד מההודעות הקודמות שלי דנו במעגל מהפך שווה ערך של 555 גל סינוס טהור שתוכנן באופן קולקטיבי על ידי מר מרסלין ואני.
איך נבנה המעגל
בתכנון זה השתמשתי בכבלים חזקים לשמירה על הזרמים הגבוהים, השתמשתי בקטעים של 70 מ'מ, או בחלקים קטנים יותר במקביל. שנאי 3 KVA הוא למעשה כמוצק שוקל 35 ק'ג. מידות ונפח אינן חסרון מבחינתי. תמונות המצורפות לשנאי וההתקנה מתבצעת.
האסיפה הבאה לקראת סיומה, על בסיס 555 (SA 555) ו- CD 4017
בניסיון הראשון שלי, עם mosfets, מוקדם יותר השנה, השתמשתי ב- IRL 1404 שה- Vdss הוא 40 וולט. לדעתי מתח לא מספיק. עדיף להשתמש במוספטים עם Vdss לפחות שווה ל -250 וולט או יותר.
בהתקנה החדשה הזו אני צופה שתי דיודות על פיתולי השנאי.
יהיה גם מאוורר לקירור.
טיפ 35 יותקן על ידי 10 בכל סניף, כך:

תמונות אב טיפוס מלאות






מעגל מהפך 3 KVA סיים
תכנון המעגל הסופי של מהפך גלי הסינוס בגודל 3 kva אמור להיראות כך:

רשימת חלקים
כל הנגדים הם 1/4 ואט 5%, אלא אם כן צוין.
- 100 אוהם - 2 ננו (ערך יכול להיות בין 100 אוהם ל -1 K)
- 1K - 2 מספרים
- 470 אוהם - 1no (יכול להיות כל ערך עד 1K)
- 2K2 - 1 נק '(ערך מעט גבוה יותר יעבוד גם)
- 180K מוגדרת מראש - 2 נק '(כל ערך בין 200K ל 330K יעבוד)
- קביעת הגדרה קבועה מראש של 10K - 1no (אנא הגדר קביעה מוגדרת מראש 1k במקום לתוצאה טובה יותר)
- 10 אוהם 5 וואט - 29 ננו
קבלים
- 10nF - 2Nos
- 5nF - 1no
- 50nF - 1no
- 1uF / 25V - 1no
מוליכים למחצה
- דיודת זנר 2.7V - 1no (ניתן להשתמש עד 4.7V)
- 1N4148 - 2 מספרים
- דיודה 6A4 - 2Nos (ליד שנאי)
- IC NE555 - 3 מספרים
- IC 4017 - 1no
- TIP142 - 2 מספרים
- TIP35C - 20 מס '
- שנאי 9-0-9 וולט 350 אמפר או 48-0-48 וולט / 60 אמפר
- סוללה 12V / 3000 Ah, או 48V 600 Ah
אם נעשה שימוש באספקת 48 וולט, וודא לווסת אותו ל 12 וולט לשלבי ה- IC, ולספק את הוולט רק לברז המרכזי של השנאי.
כיצד להגן על הטרנזיסטורים
הערה: על מנת להגן על הטרנזיסטורים מפני בורח תרמי, הרכיבו את הערוצים הנפרדים מעל צלעות הקירור הנפוצות, כלומר השתמשו בגוף גוף קירור יחיד ארוך עבור מערך הטרנזיסטור העליון, ובגוף קירור משותף אחר דומה למערך הטרנזיסטור התחתון.
למרבה המזל לא יהיה צורך בבידוד נציצים מכיוון שהאספנים מחוברים זה לזה, והגוף שהוא האספן יתחבר ביעילות דרך גוף הקירור עצמו. זה באמת יחסוך הרבה עבודה קשה.
על מנת להשיג יעילות הספק מרבית, מומלץ להציע את שלב הפלט הבא, ויש להשתמש בו עם שלבי ה- PWM וה- 4017 שהוסברו לעיל.
תרשים מעגל

הערה: הרכיב את כל ה- TIP36 העליון מעל גוף קירור משותף גדול יותר עם סנפיר, אל תשתמש במבודד נציצים בזמן יישום זה.
אותו הדבר חייב להיעשות עם מערכי TIP36 התחתונים.
אך וודא ששני גוף הקירור לעולם אינם נוגעים זה בזה.
הטרנזיסטורים TIP142 חייבים להיות מותקנים על כיורי שמיעה גדולים ונפרדים נפרדים.
קודם: כיצד ליצור זרוע רובוטית אלחוטית באמצעות ארדואינו הבא: 3 מטענים סוללת ליתיום חכמים המשתמשים TP4056, IC LP2951, IC LM3622